EMG driven exosuits has been proposed to be a rehabilitation assistive device for patients with motor impairments. The advantages of an EMG exosuit include portability, metabolic efficiency, and ergonomics.
2
Intention detection of an exosuit detects the user’s intended movement, via EMG, and provides the necessary assistance to help the patient move the corresponding muscle.
3
EMG driven controllers, in replacement of classical control methods of exosuits, have allowed researchers to isolate and characterize the relationship between assistance magnitude and muscular benefits to make the controller more versatile across various tasks.
Researchers from Heidelberg University, ETH Zurich and the University of Zurich have looked to apply a new model towards the development of a novel soft exosuit. Creating an EMG-driven soft exosuit is of large interest to a variety of fields as the growing field of soft wearable exosuits, is gradually gaining terrain and proposing new complementary solutions in assistive technology, with several advantages in terms of portability, kinematic transparency, ergonomics, and metabolic efficiency. Those are palatable benefits that can be exploited in several applications, ranging from strength and resistance augmentation in industrial scenarios, to assistance or rehabilitation for people with motor impairments.
To be effective, however, an exosuit needs to synergistically work with the human and matching specific requirements in terms of both movement kinematics and dynamics: an accurate and timely intention-detection strategy is the paramount aspect which assume a fundamental importance for acceptance and usability of such technology.
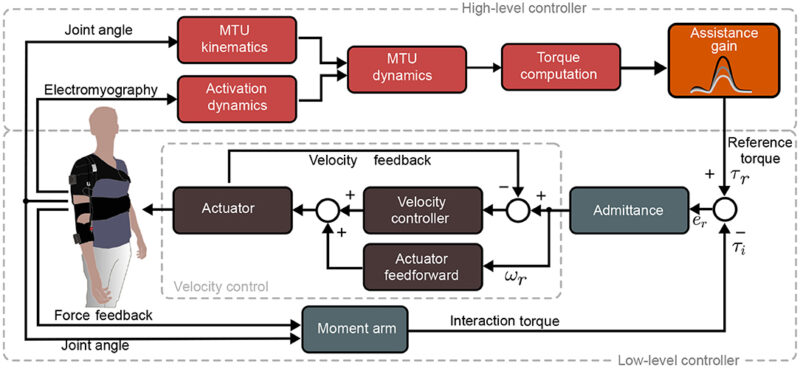
The authors previously proposed to tackle this challenge by means of a model-based myoelectric controller, treating the exosuit as an external muscular layer in parallel to the human biomechanics and as such, controlled by the same efferent motor commands of biological muscles.
However, previous studies that used classical control methods, demonstrated that the level of device’s intervention and effectiveness of task completion are not linearly related: therefore, using a newly implemented EMG driven controller, the authors isolated and characterized the relationship between assistance magnitude and muscular benefits, with the goal to find a range of assistance which could make the controller versatile for both dynamic and static tasks.
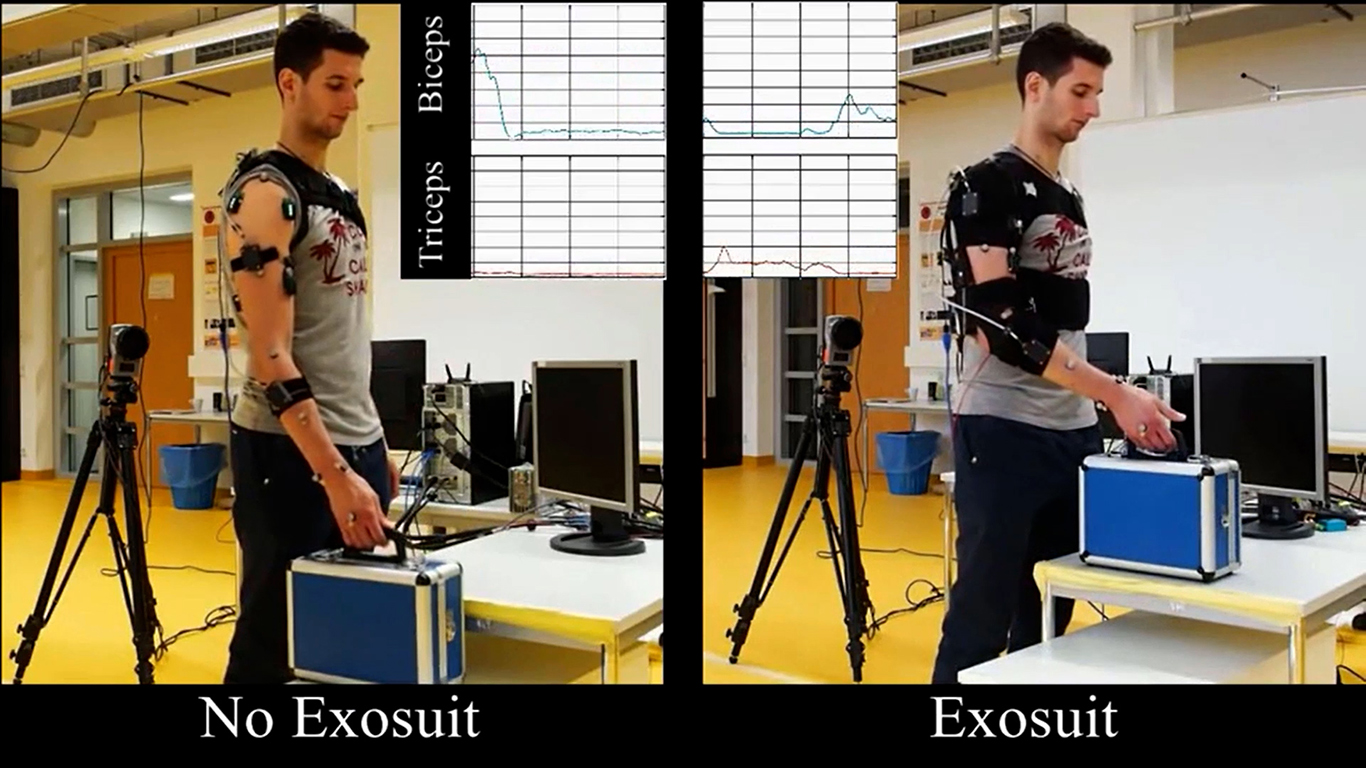
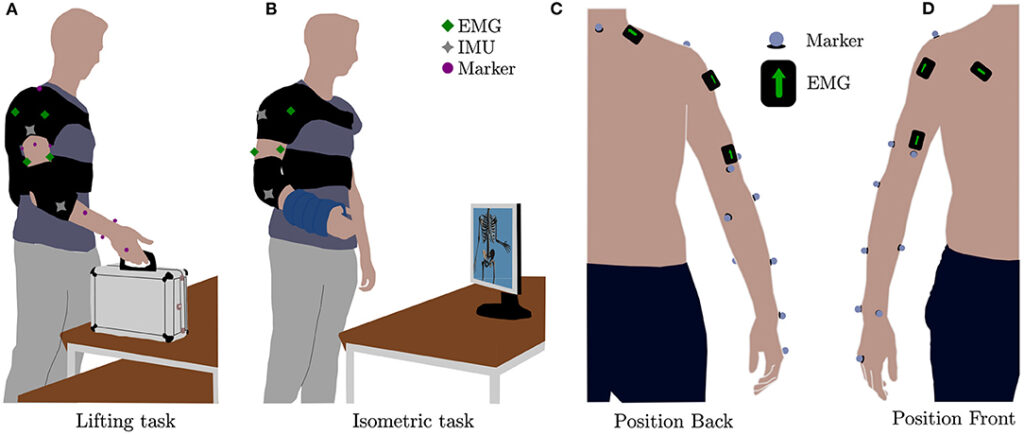
Ten healthy participants performed the experiment resembling functional daily activities living in separate assistance conditions: without the device’s active support and with different levels of intervention by the exosuit.
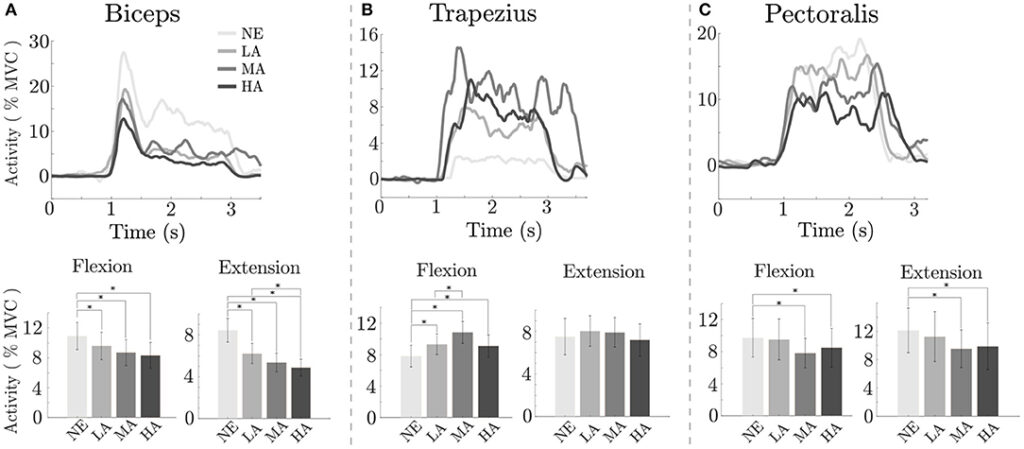
By using the Trigno Avanti sensors, higher assistance levels resulted in larger reductions in the activity of the muscles augmented by the suit actuation and a good performance in motion accuracy, despite involving a decrease of the movement velocities, with respect to the no assistance condition. Moreover, increasing torque magnitude by the exosuit resulted in a significant reduction in the biological torque at the elbow joint and in a progressive effective delay in the onset of muscular fatigue.
Thus, contrarily to classical force and proportional myoelectric schemes, the implementation of an opportunely tailored EMG driven model-based controller affords to naturally match user’s intention detection and provide an assistance level working symbiotically with the human biomechanics.
Reference for the paper and all graphics: Missiroli F, Lotti N, Xiloyannis M, Sloot LH, Riener R and Masia L (2020) Relationship Between Muscular Activity and Assistance Magnitude for a Myoelectric Model Based Controlled Exosuit. Front. Robot. AI 7:595844. doi: 10.3389/frobt.2020.595844
Explore More Topics
News
From Rehab to Readiness: EMG That Keeps Pace with Athletes