Myoelectrical signals from EMG can be used to create model-based predictions of limb movements and forces.
2
EMG has the ability to assist human movement through actuating an assistive devices that acts faster than the neuromechanical delay of around 100ms.
3
The ease of use of EMG makes it an attractuve option for interfacing with machines, robotics, and exoskeletons.
Within rehabilitation and industrial scenarios, assistive devices such as active orthoses, exoskeletons, or other close-to-body systems can play a major role with helping to alleviate the repetitive nature of certain movements on the individual performing them. For this, the force that is typically produced by the human needs to be created and implemented through a human-machine interface (HMI) such as an assistive device. Model based predictions of the limb movements can be created from the myoelectric signals; collected from the data of surface electromyography (sEMG) technologies.
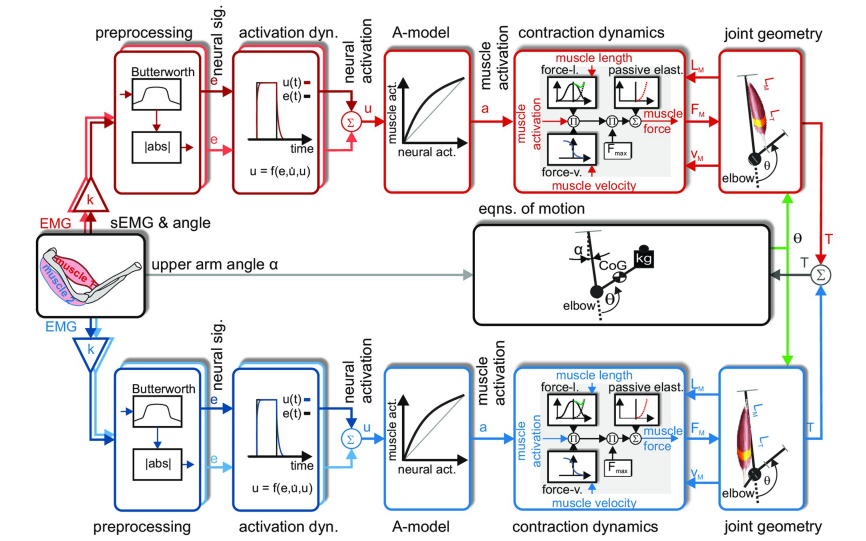
Between the initial detection of the myoelectric signal and muscle contraction, there is a delay. During this delay, which can be around 106ms for knee extensors or 53ms for upper limb muscles, there is an opportunity to feed the signal from the muscle into a muscle driven model and aid a person’s movement through an assistive device. However, for this to work within a short period of time, the model must be suitably fast within the algorithm stage, but also be of sufficient quality for limb movement to be predicted and then mapped to the movement of the robotic device.
For this, researchers have recently modelled the predicted movement of the human forearm by employing a biomechanical model that reduces the amount of optimization parameters whilst being based on individual anatomical and physiological measures. The aim of the work was to create a model that can be adapted to a new user or movement scenario with little measurement and computing effort.
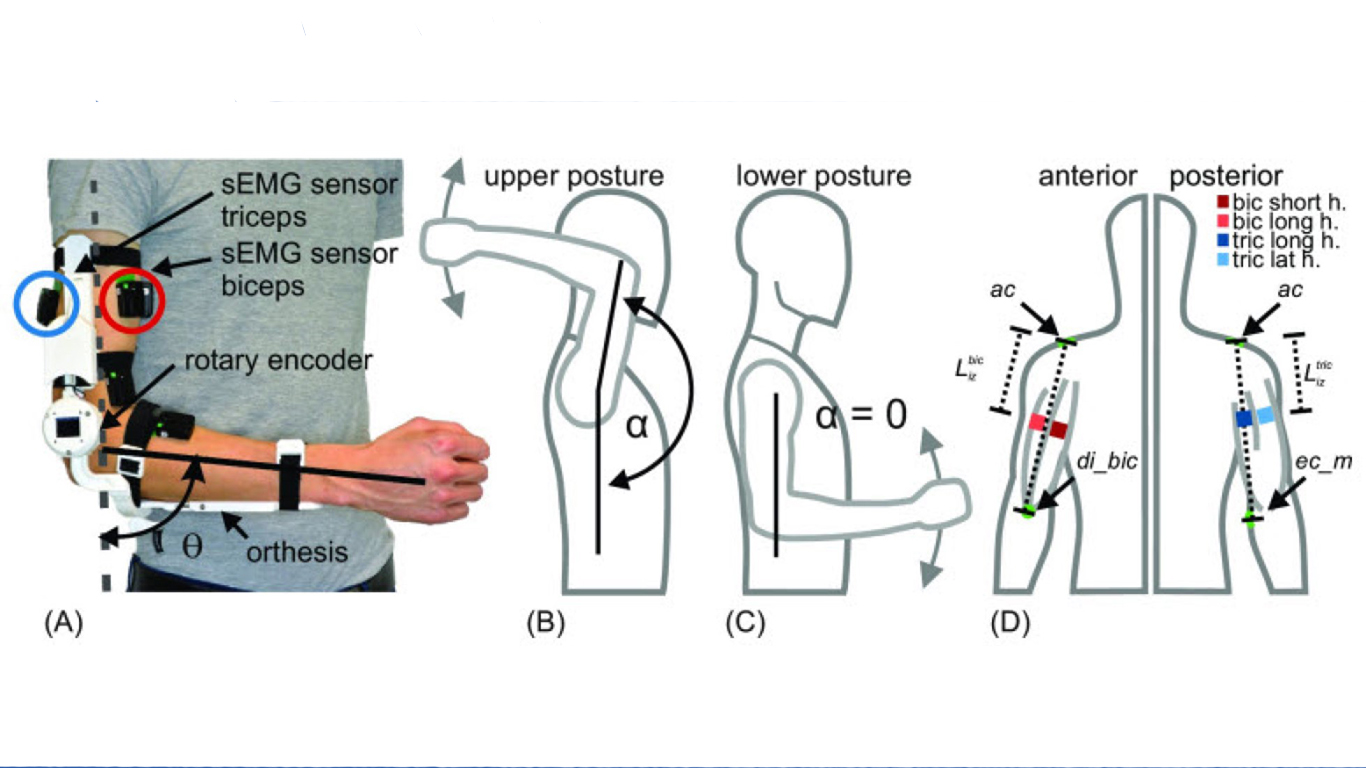
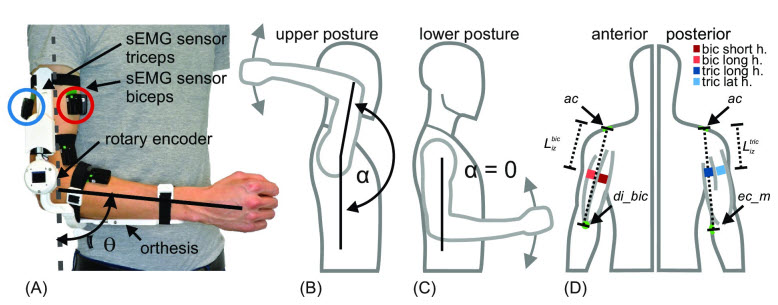
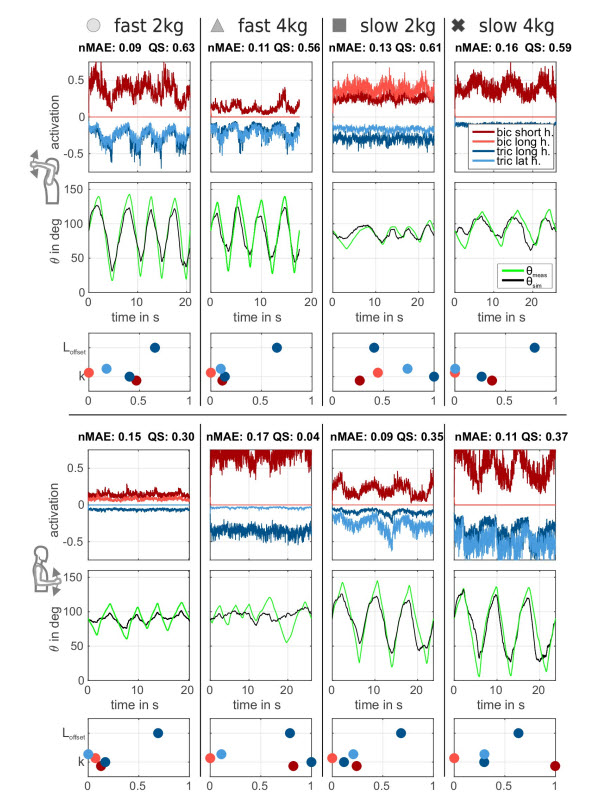
A biomechanical model is presented that predicts limb movements of the human forearm based on easy to measure sEMG signals, from Trigno Avanti sensors, of the main muscles involved in forearm actuation (lateral and long head of triceps and short and long head of biceps). The model has 42 internal parameters of which 37 were attributed to 8 individually measured physiological measures (location of acromion at the shoulder, medial/lateral epicondyles as well as olecranon at the elbow, and styloid processes of radius/ulna at the wrist; maximum muscle forces of biceps and triceps). The remaining 5 parameters are adapted to specific movement conditions in an optimization process. The model was tested in an experimental study with 31 subjects in which the prediction quality of the model was assessed. The quality of the movement prediction was evaluated by using the normalized mean absolute error (nMAE) for two arm postures (lower, upper), two load conditions (2 kg, 4 kg) and two movement velocities (slow, fast).
For the resulting 8 experimental combinations the nMAE varied between nMAE = 0.16 and nMAE = 0.21 (lower numbers better). An additional quality score (QS) was introduced that allows direct comparison between different movements. This score ranged from QS = 0.25 to QS = 0.40 (higher numbers better) for the experimental combinations. The above formulated aim was achieved with good prediction quality by using only 8 individual measurements (easy to collect body dimensions) and the subsequent optimization of only 5 parameters. At the same time, just easily accessible sEMG measurement locations are used to enable simple integration, e.g. in exoskeletons.
This biomechanical model does not compete with models that measure all sEMG signals of the muscle heads involved in order to achieve the highest possible prediction quality, but the quality of the movement prediction of the domain model in this work will serve as a reference for future work.
Future work includes the further development of the domain model shown here towards a hybrid model that integrates additional, data-driven (ML-based) sub-models. Such a hybrid approach could, on the one hand, further increase the prediction quality and, on the other hand, identify and address over-simplifications in sub-models of the existing domain model. Such a hybrid approach should also combine the explainability of a pure domain model with the adaptability of a purely data-driven (black box) approach.
Paper Reference:
Grimmelsmann N, Mechtenberg M,Schenck W, Meyer HG, Schneider A (2023): sEMG-based prediction of human forearm movements utilizing a biomechanical model based on individual anatomical/ physiological measures and a reduced set of optimization parameters.